











Productos Propiedades Rurales Información gráfica sobre los deslindes prediales rurales...

Productos Suelos Agrológicos Los estudios agrológicos permiten localizar, identificar, definir...

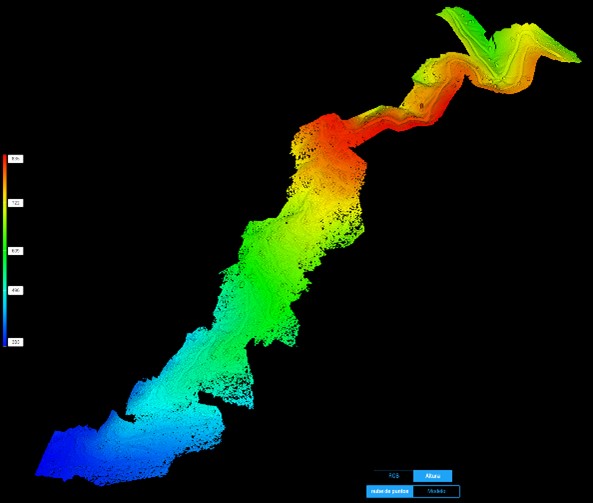
Productos Ortoimágenes con capas de información temática Imágenes aéreas o...

Productos Fotomosaicos PAF Cartografía histórica referida a mosaicos semicontrolados de...
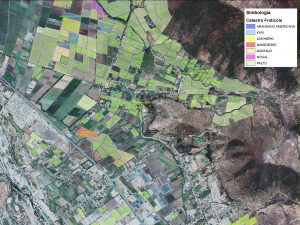
Productos Directorio Frutícola Producto con archivos raster y directorio en...